Screw-Driven
Elevator System
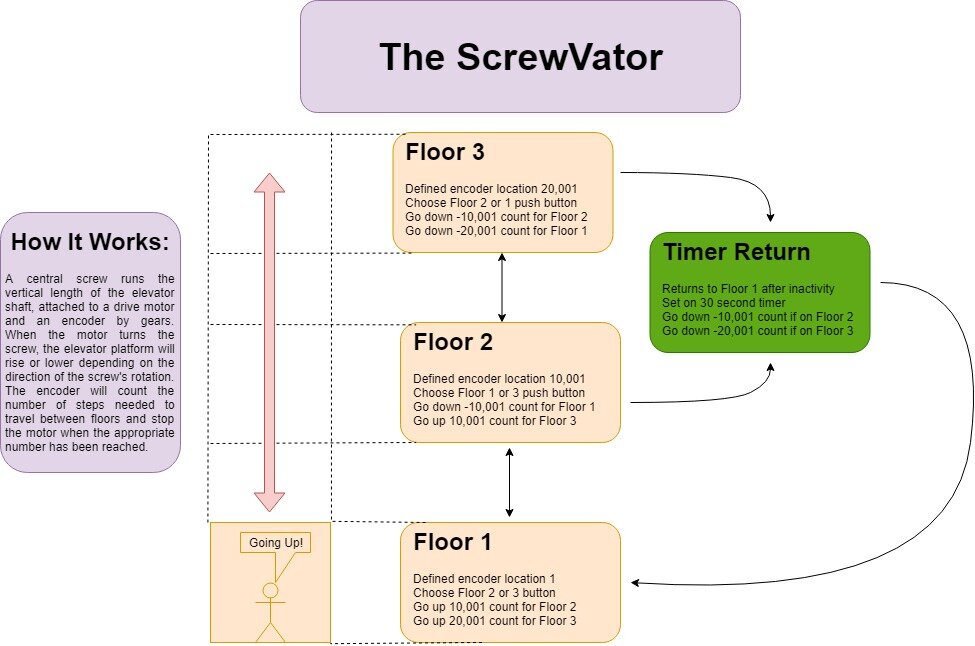
This was another of our rapid prototyping assignments for our robotics class. We were challenged to design and build a small scale elevator that would deliver a payload to three possible floors. The floors would be chosen by their respective pushbuttons and the platform would return to the first floor after 10 seconds of inactivity. My partner and I decided to design our system using a long threaded screw shaft to raise and lower the platform as it rotates left or right. The screw was powered by a geared motor and a geared motor controller to count the number of revolutions of the shaft until it reaches the desired “floor”. The system worked well and was highly efficient due to the screw’s mechanical advantage, but was also somewhat slow as the finer the threads meant the motor had to turn more.